Η εκ του μηδενός Δημιουργία!!!
- Τα παιδιά μέσα από το πρόγραμμα γνωρίζουν την πραγματική Ρομποτική.
- Δεν συναρμολογούν απλά προκατασκευασμένα παιχνίδια.
- Φτιάχνουν τις δικές τους ρομποτικές μηχανές από το μηδέν μαθαίνοντας το μαγικό κόσμο της Πληροφορικής και τις Ανοιχτές Τεχνολογίες του Μέλλοντος.
- Οι έννοιες των θετικών επιστημών προσεγγίζονται μέσω του ρήματος φτιάχνω.
- Χρησιμοποιούν Ελεύθερο Λογισμικό / Λογισμικό Ανοικτού Κώδικα και Ανοικτό Υλικό (OPEN HARDWARE).
- Στο 2ο επίπεδο σχεδιάζουν σε 3d Printing πρόγραμμα τα δικά τους ρομπότ, συναρμολογούν και προγραμματίζουν.


Ρομπότ
Ο όρος "ρομπότ" εμφανίστηκε αρχικά σε ένα θεατρικό έργο επιστημονικής φαντασίας του Τσέχου συγγραφέα Κάρελ Τσάπεκ το 1921. Απορρέει από τη λέξη "robota" στη σλαβική γλώσσα, που σημαίνει "εργάτης". Η αυτοματοποίηση της παραγωγικής διαδικασίας στις βιομηχανίες μαζικής παραγωγής αντικαθιστά την ανθρώπινη εργασία με εξειδικευμένες μηχανές που εκτελούν προκαθορισμένες εργασίες στα προϊόντα που παράγονται. Ο στόχος της αυτοματοποίησης, που έγινε εφικτή με την επιστημονική και τεχνολογική πρόοδο του 20ού αιώνα, είναι η αύξηση της παραγωγικότητας, η βελτίωση της ποιότητας, η αύξηση των κερδών των επιχειρήσεων και η επιτυχής έλεγχος των μέσων παραγωγής.
«Ρομπότ είναι μια επαναπρογραμματιζόμενη πολυλειτουργική χειριστική διάταξη, σχεδιασμένη για τη μετακίνηση υλικών, εξαρτημάτων, εργαλείων και εξειδικευμένων διατάξεων, μέσω μεταβλητών, προγραμματισμένων κινήσεων για την εκτέλεση μιας σειράς εργασιών».
Ένα ρομπότ αποτελείται από δύο βασικά συστήματα, το μηχανικό σύστημα που περιλαμβάνει το σύστημα κίνησης, και το ηλεκτρονικό σύστημα που περιλαμβάνει την επαναπρογραμματιζόμενη μνήμη του. Υπάρχουν διάφορα κριτήρια και κατηγοριοποιήσεις για τα ρομπότ. Μία από αυτές είναι η διάκρισή τους σε τρεις γενιές. Στην πρώτη γενιά, οι ρομπότ έχουν περιορισμένη ευελιξία και ελέγχονται από τον άνθρωπο, όπως οι απλοί "χειριστές" που χρησιμοποιούνται για τη μεταφορά επικίνδυνων αντικειμένων, όπως ραδιενεργά υλικά. Στη δεύτερη γενιά, τα ρομπότ διαθέτουν προκαθορισμένο πρόγραμμα δράσης ή λαμβάνουν εντολές από ένα σύστημα αριθμητικού ελέγχου. Στην τρίτη γενιά, τα ρομπότ είναι εφοδιασμένα με:
- με αισθητήριες «πληροφορίες» από το περιβάλλον,
- με διάταξη επεξεργασίας των πληροφοριών και
- με κινητήριο σύστημα εκτέλεσης εργασιών.
Το πρώτο βιομηχανικό ρομπότ κατασκευάστηκε και τέθηκε σε λειτουργία το 1961. Σύμφωνα με έναν ευρέως αποδεκτό ορισμό που χρονολογείται από το 1980, ένα βιομηχανικό ρομπότ είναι μια επαναπρογραμματιζόμενη μηχανή που σχεδιάστηκε για τη μετακίνηση αντικειμένων, εργαλείων ή διατάξεων μέσω μιας ποικιλίας προγραμματιζόμενων κινήσεων προκειμένου να εκτελέσει εργασίες. Ο παραπάνω ορισμός αντικατοπτρίζει την τρέχουσα εφαρμογή των ρομπότ στον βιομηχανικό τομέα, ο οποίος αποτελεί έναν αναπτυγμένο και ώριμο τομέα εφαρμογής της ρομποτικής τεχνολογίας και των προϊόντων της. Τυπικές εφαρμογές των βιομηχανικών ρομπότ στη βιομηχανία περιλαμβάνουν τη φόρτωση και εκφόρτωση προϊόντων, τη βαφή, την κοπή και πολλές άλλες.

Η εφαρμογή της ρομποτικής τεχνολογίας επεκτείνεται και σε άλλους τομείς, όπως η εξερεύνηση του διαστήματος, η ιατρική, οι αγροτικές εφαρμογές, η έρευνα και η διάσωση, μεταξύ άλλων. Παρά την ύπαρξη πρωτοτύπων, η ρομποτική τεχνολογία σε αυτούς τους τομείς εξακολουθεί να βρίσκεται σε πρώιμο στάδιο ανάπτυξης. Οι αιτίες για αυτό μπορούν να αναζητηθούν στην έλλειψη βαθύτερης κατανόησης των μηχανισμών ελέγχου που επιτρέπουν στον άνθρωπο να χειρίζεται επιδέξια μια ποικιλία αντικειμένων στην καθημερινή ζωή του. Ένα παράδειγμα αυτού είναι ο επιτυχής χειρισμός ενός ποτηριού, μια καθημερινή ενέργεια για τον άνθρωπο, αλλά ο ίδιος δεν μπορεί να εξηγήσει λεπτομερώς τις κινήσεις και την αλληλουχία ενεργειών που του επέτρεψαν να το επιτύχει. Ως αποτέλεσμα, η έρευνα σε αυτόν τον τομέα είναι έντονη, προωθώντας την επιστήμη και την τεχνολογία. Οι επιστημονικές φαντασιακές δημιουργίες, από τα βιβλία του Ρώσου συγγραφέα Ισαάκ Ασίμωφ τη δεκαετία του 1940 έως τις κινηματογραφικές παραγωγές όπως "Ο πόλεμος των άστρων", έχουν επηρεάσει την αντίληψη του κοινού για τα ρομπότ. Στην επιστημονική κοινότητα, τα ρομπότ θεωρούνται μηχανές που, ανεξάρτητα από την εμφάνισή τους, έχουν τη δυνατότητα να αλλάξουν το περιβάλλον στο οποίο λειτουργούν, ακολουθώντας εγγενείς κανόνες και βασιζόμενα σε δεδομένα που συλλέγουν από τους αισθητήρες τους για τον εαυτό τους και το περιβάλλον τους.

Είδη ρομπότ
Η επιστήμη της ρομποτικής έχει δημιουργήσει διάφορα είδη ρομποτικών μηχανισμών κατά την πολυετή της εξέλιξη. Αυτοί οι μηχανισμοί διαφέρουν σε μορφή, αλλά αποτελούνται από ξεχωριστά υποσυστήματα. Όπως αναφέρθηκε προηγουμένως, τα βασικά υποσυστήματα είναι το μηχανολογικό, το υποσύστημα αίσθησης και το σύστημα ελέγχου.
Οι σημαντικότερες κατηγορίες ρομπότ περιλαμβάνουν:
Ρομπότ Σταθερής Βάσης: Αυτά τα ρομπότ αποτελούνται από συνδεδεμένα στερεά σώματα με αρθρώσεις, δημιουργώντας μια κινηματική αλυσίδα. Η βάση του ρομπότ είναι σταθερά συνδεδεμένη με το περιβάλλον. Αυτή η μορφή ρομπότ αντιπροσωπεύει την παραδοσιακή μορφή βιομηχανικού ρομποτικού βραχίονα και περιλαμβάνει το βραχίονα, τον καρπό και το εργαλείο.

Κινηματικά Αλυσιδωτά Ρομπότ: Αυτά τα ρομπότ αποτελούνται από συνδεδεμένα κινηματικά στοιχεία που σχηματίζουν αλυσίδα. Κάθε στοιχείο μπορεί να εκτελέσει διαφορετικές κινήσεις, προσφέροντας ευελιξία στην κίνηση του ρομπότ.

Ρομπότ Κινούμενης Βάσης: Αυτά τα ρομπότ διαθέτουν κινητή βάση που τους επιτρέπει να μετακινούνται σε διάφορα περιβάλλοντα. Οι κινηματικές δυνατότητες τους συνήθως περιλαμβάνουν την κίνηση σε ευθείες γραμμές ή την περιστροφή γύρω από άξονες.
Αυτές είναι μερικές από τις κύριες κατηγορίες ρομπότ που έχουν αναπτυχθεί στον χώρο της ρομποτικής. Κάθε κατηγορία έχει τις δικές της εφαρμογές και χαρακτηριστικά που τις καθιστούν ξεχωριστές.
Εκπαιδευτική ρομποτική
Η εκπαιδευτική ρομποτική αποτελεί την εφαρμογή κινητήρων και αισθητήρων για τη δημιουργία αυτοματισμού. Για παράδειγμα, μπορούμε να εξετάσουμε την περίπτωση όπου η ρομποτική συσκευή εκπέμπει έναν συναγερμό όταν πλησιάζουμε πολύ κοντά σε μία πόρτα. Για να υλοποιηθεί αυτός ο αυτοματισμός, ο αισθητήρας απόστασης ελέγχει συνεχώς εάν υπάρχει αντικείμενο που πλησιάζει την πόρτα. Όταν η απόσταση μειωθεί κάτω από ένα καθορισμένο όριο, ο κινητήρας λαμβάνει εντολή για περιστροφή. Η περιστροφή του κινητήρα ενεργοποιεί τη σειρήνα, η οποία αρχίζει να εκπέμπει ένα σήμα σφύριγμα. Για παράδειγμα, μπορούμε να χρησιμοποιήσουμε μία ηλεκτρική σειρήνα και ο κινητήρας απλά να πατήσει το κουμπί ενεργοποίησης.
Η εκπαιδευτική Ρομποτική αποτελεί μια σύγχρονη και δυναμική μέθοδο Μάθησης, η οποία:
- προάγει την ομαδικότητα, την καινοτομία, τον προγραμματισμό, την ανάπτυξη δεξιοτήτων νόησης, επικοινωνίας και την ικανότητα επίλυσης προβλημάτων, αυξάνει την αυτοπεποίθηση και την κοινωνικοποίηση των μαθητών.
- βοηθά στην κατανόηση πολλών φυσικών & χημικών φαινομένων, μαθηματικών εννοιών και στην άντληση ιστορικών στοιχείων.
- ευνοεί την ανάπτυξη ερευνητικού ενδιαφέροντος & ωθεί τους μαθητές να προτείνουν καινοτόμες ιδέες και λύσεις,
- παρέχει κίνητρα στους μαθητές να μελετήσουν την επιστήμη και την τεχνολογία και τους δίνει την πρακτική δυνατότητα να εφαρμόσουν τις επιστημονικές γνώσεις στην επίλυση πραγματικών προβλημάτων που αφορούν διαφορετικά γνωστικά αντικείμενα.
- καθιστά την μάθηση βιωματική και εστιάζει στην ελεύθερη έκφραση, την δημιουργικότητα, την φαντασία, την προσωπικότητα, τα ενδιαφέροντα, τις κλίσεις, τα ταλέντα κάθε μαθητή και δίνει σε αυτόν τη δυνατότητα να συμμετέχει ενεργά και να «μαθαίνει» μέσα από συνδυασμένες τεχνικές.
- καλλιεργεί το ομαδικό πνεύμα και την επικοινωνία μεταξύ των μελών της ομάδας και οδηγεί στη δημιουργική συνεργασία.
- διευκολύνει στην οργάνωση σχεδιασμού, προγραμματισμού, υλοποίησης και ολοκλήρωσης σύνθετων εργασιών (διαθεματικά project).

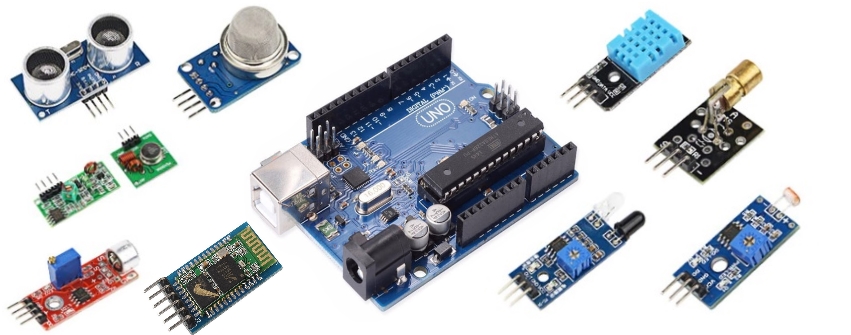
Αισθητήρες στη ρομποτική
Στον τομέα της εκπαιδευτικής ρομποτικής, χρησιμοποιούμε δύο κύρια είδη αισθητήρων, τον αισθητήρα κλίσης και τον αισθητήρα απόστασης. Ο αισθητήρας κλίσης παρέχει έξι προκαθορισμένες θέσεις, οι οποίες αντιστοιχούν σε διάφορες τιμές, ανάλογα με την κλίση που ανιχνεύει ο αισθητήρας. Κάθε θέση έχει μια διαφορετική τιμή για τον αισθητήρα κλίσης. Από την άλλη πλευρά, ο αισθητήρας απόστασης μετράει την απόσταση ενός αντικειμένου από τον αισθητήρα. Οι τιμές απόστασης κυμαίνονται από το 0 έως το 100. Αν χρησιμοποιούμε το Scratch 1.4, μπορούμε να χρησιμοποιήσουμε μόνο έναν αισθητήρα κάθε φορά. Για να συνδέσουμε έναν αισθητήρα με τον υπολογιστή, χρησιμοποιούμε ένα κέντρο (hub), στο οποίο συνδέεται ο επιλεγμένος αισθητήρας.
Κινητήρας
Μέχρι στιγμής, έχουμε εξετάσει δύο αισθητήρες που αντλούν μετρήσεις από τον πραγματικό κόσμο. Αυτές οι μετρήσεις χρησιμοποιούνται από το πρόγραμμα Scratch. Στη συνέχεια, το πρόγραμμα αποφασίζει εάν πρέπει να ενεργοποιήσει τον κινητήρα ή όχι. Ο κινητήρας συνδέεται με το κέντρο (hub) και λαμβάνει εντολές από το πρόγραμμα. Μπορεί να λειτουργεί ή να μην λειτουργεί, ανάλογα με την κατεύθυνση που δίνει το πρόγραμμα. Όταν είναι ενεργός, ο κινητήρας περιστρέφεται με μια συγκεκριμένη ισχύ. Το πρόγραμμα καθορίζει δύο πράγματα: πρώτον, εάν ο κινητήρας είναι ενεργός ή ανενεργός, και δεύτερον, την ισχύ του κινητήρα.
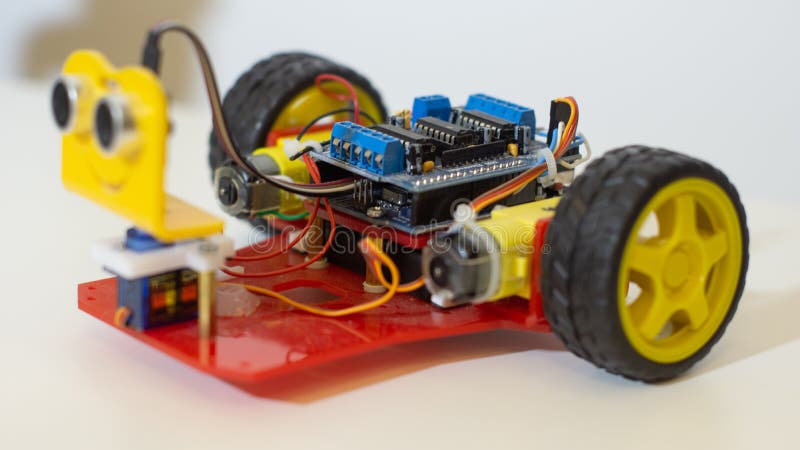
Εφαρμογές ρομποτικής στο δημοτικό
Αφού ανακαλύψουμε τις βασικές αρχές λειτουργίας των κινητήρων και των αισθητήρων, μπορούμε να δημιουργήσουμε απλά προγράμματα μαζί με τους μαθητές του δημοτικού. Ένας ενδιαφέρων τρόπος είναι να εκμεταλλευτούμε τις μαθηματικές γνώσεις για να αξιολογήσουμε τις μετρήσεις των κινητήρων. Για παράδειγμα, μπορούμε να υπολογίζουμε το ήμισυ ή το διπλάσιο της απόστασης. Ένα άλλο παράδειγμα είναι να εκτιμούμε τις κλίσεις χρησιμοποιώντας τον αισθητήρα κλίσης. Η συνδυασμένη χρήση μαθηματικών, προγραμματισμού και ρομποτικής αποτελεί το ιδανικό εργαλείο για να επιτρέψουμε στα παιδιά να κατανοήσουν πολλές δύσκολες έννοιες μέσα από το παιχνίδι. Με λίγη φαντασία, μπορούμε να σχεδιάσουμε αμέτρητες ρομποτικές κατασκευές και αυτοματισμούς.
Συνδυασμός εκπαιδευτικής ρομποτικής με το excel
Και βεβαίως εδώ αξίζει τον κόπο να συνδυάσουμε και πολλά άλλα προγράμματα. Μπορούμε για παράδειγμα να χρησιμοποιήσουμε το excel για να καταγράφουμε τις τιμές των πειραμάτων που θα κάνουμε με την εκπαιδευτική ρομποτική. Η καταγραφή τιμών είναι από τα σημαντικότερα πράγματα που γίνονται στα εργαστήρια φυσικής. Διότι η εκπαιδευτική ρομποτική σε συνδυασμό με το πρόγραμμα του excel μπορεί να μας εισάγει σε αυτό τον τρόπο εργασίας. Εννοείται βέβαια πώς θα έχει προηγηθεί η διδασκαλία του excel ήδη από προηγούμενα μαθήματα.